When evaluating limits of rational functions (and others), a minor problem that can arise is the “indeterminate form”, two of which are “0/0” and “∞/∞”.These problems can sometimes be resolved by invoking the Taylor Series, then simplifying from there and evaluating. This, however, can be a time consuming and rather messy process. Another option is to exploit L’Hospital’s Rule, a brief synopsis of which is shown directly below. Several examples of indeterminate forms of limits will then follow.
Mean Value Theorem of Differential Calculus


There are four examples below showing the application of L’Hospital’s Rule. The first is the fundamental trigonometric limit that was previously proven using the Squeeze Theorem.
The second example reflects on a previous entry e^(Pi) vs (Pi)^e ; here, the limit as x →∞ results in the indeterminate form “∞/∞”.
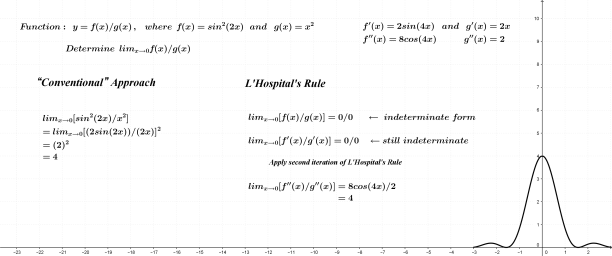
Following e^(Pi) vs (Pi)^e, I’ve included an example illustrating the need for a second iteration of L’Hospital’s Rule. Students can once again practice various rules of differentiation here and, as an added benefit, exploit a trigonometric identity to simplify the process.
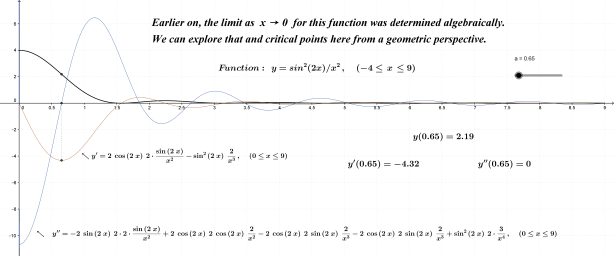
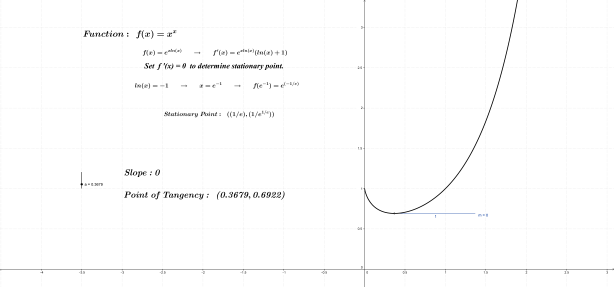
The final example exploits L’Hospital’s Rule in determining the limit of the function y=x^x as x→0. In this scenario, the function itself is tweaked in such a way that leads to an indeterminate limit in the exponent; from this point, L’Hospital’s Rule once again allows us to move forward. The coordinates of this function’s minimum value is also identified to serve as a review of that concept.
Dealing with Indeterminate Limits
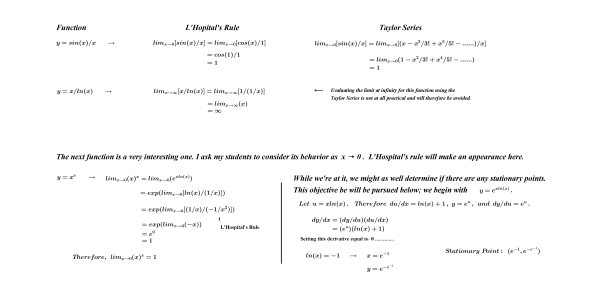
Two Iterations of L’Hospital’s Rule
Click on the link provided here to explore the relationships between y, y’ and y” in curve sketching.
Graph of f(x)=x^x
Click on the link provided here to explore f'(x) shown in the graph above.
Thanks for reading.
Reference
Kline, Morris. (1998). Calculus: An Intuitive and Physical Approach. Mineola, NY: Dover Publications.